목차
1. V/F 제어
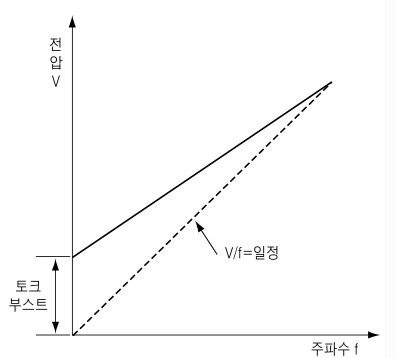
기존의 범용 인버터 제어는 f(주파수)를 가변 할 경우에
V(출력 전압)와의 비율(V/f)이 그림의 점선과 같이
일정하게 되도록 하고 있습니다. 따라서 이 방식을
V/F 제어라고 부릅니다.
이 방식은 배선이나 모터의 1차 코일에서의 전압 강하에
의해 실제로 유효하게 되는 전압이 감소하기 때문에
충분한 토크가 나오지 않게 됩니다.
이 현상은 저속일수록 크게 영향을 줍니다.(저속 토크가
부족합니다.)
여기서 미리, 전압 강하분을 추정해서 그 만큼, 그림의
실선과 같이 전압을 높게 해서 저속에서의 토크 부족을
보충합니다.
2. 범용 자속 벡터 제어
인버터의 출력 전류를 여자 전류와 토크분 전류에 벡터 연산에 의해 분할해서 부하 토크에 알맞은 모터 전류를
흘릴 수 있도록 전압의 보정을 실시하는 것으로 저속 토크를 향상시키는 방식으로 6Hz에서 200%(3.7kW 이하의
경우)의 고토크를 얻을 수 있습니다.
모터 정수가 다소 어긋나도 특별한 모터 정수의 설정이나 튜닝을 실시하지 않고 안정된 큰 저속 토크를 얻을 수
있기 때문에 높은 범용성을 실현하고 있습니다.
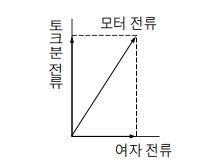
- 인버터의 출력 전류(모터 전류)를 출력 주파수와 출력 전압에 대한 각 상의 전류 위상으로부터, 여자 전류(자속을 발생시키는데 필요한 전류)와 토크분 전류 (부하 토크에 비례하는 전류) 와의 벡터 연산에 의해 분할합니다.(그림 참조)
- 부하 변동에 의해 모터 전류가 변화하면 표준 모터의 1차측 (배선을 포함)의 전압 강하분도 변화하기 때문에 여자 전류의 크기에 영향이 있습니다. 이 전압 강하분을 표준 모터 및 1차 배선 정수와 토크분 전류의 크기로부터 구해서 표준 모터의 1차 자속이 항상 일정하게 되도록 인버터의 출력 전압을 보정(증감) 합니다.
3. 어드밴스트 자속 벡터 제어
인버터 출력 전류를 여자 전류와 토크분 전류에 벡터 연산으로 분할해서 부하 토크에 맞는 모터 전류를 흘릴 수
있도록 주파수와 전압의 보정을 실시하는 것으로 저속 토크 및 속도 제어 범위를 향상시키는 방식으로,
0.5Hz에서 150%의 고토크를 실현하고 있습니다.
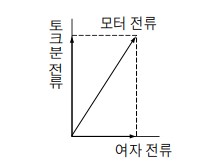
- 인버터의 출력 전류 (모터 전류) 를 출력 주파수와 출력 전압에 대한 각 상의 전류 위상으로부터 여자 전류 (자속을 발생시키는데 필요한 전류) 와 토크분 전류 (부하 토크에 비례하는 전류) 와의 벡터 연산에 의해 분할합니다. (그림 참조)
- 토크분 전류로부터 모터의 실제 속도를 추정하고, 설정 속도가 되도록 출력 주파수를 보정(증감) 합니다.<슬립 보정>
- 부하 변동에 의해 모터 전류가 변화하면, 표전 모터의 1차측 (배선을 포함) 의 전압 강하분도 변화하기 때문에 여자 전류의 크기에 영향이 있습니다. 이 전압 강하분을 표준 모터 및 1차 배선 정수와 토크분 전류의 크기로부터 구해서 표준 모터의 1차 자속이 항상 일정하게 되도록 인버터의 출력 전압을 보정(증감) 합니다.
4. 리얼 센서리스 벡터 제어
인버터의 출력 전류를 여자 전류와 토크분 전류에 벡터 연산으로 분할해서 부하 토크에 맞는 모터 전류를 흘릴 수
있도록 주파수와 전압을 최적으로 제어를 실시하는 것에 의해 저속 토크, 속도 제어 범위 및 속도 응답을 향상시키는
방식으로 0.3Hz에서 최대 200%(3.7kW 이하)의 고토크를 실현하고 있습니다.
- 모터 전류와 출력 전압으로부터 연산된 속도 추정값을 속도 피드백값으로 사용하여, 벡터 제어와 같이 전류 제어 루프를 가지고 있어 필요한 여자 전류와 토크분 전류를 따로따로 연산하는 것이 가능하게 됩니다.
토크분 전류의 제어에 의해 부하의 변화에 재빠르게 대응할 수 있고 (고응답), 토크 지령을 주는 것으로
토크 제어도 가능하게 됩니다.
리얼 센서리스 벡터 제어란
벡터 제어는 속도 검출용 엔코더 (PLG) 부착 전용 일반형 모터 또는 PLG 부착 표준 일반형 모터를 마치
직류 모터와 같이 취급해 운전 제어하는 수법입니다.
이것에 의해 리얼 센서리스 벡터 제어는 표준 일반형 모터를 벡터 제어에 가까운 상태로 운전할 수 있도록
개발한 제어 수법입니다.
리얼 센서리스 벡터 제어 방식의 특징
(1) 벡터 제어는 회전자의 회전 속도를 축단에 설치한 검출기 (PLG) 에 의해 실시하고 있으므로, 고정도로
회전 속도를 검출할 수 있습니다. 한편, 리얼 센서리스 벡터 제어에서는 회전자의 회전 속도를 모터 전압,
전류로부터 추정하고 있으므로 검출 정도는 내려가지만 표준 모터를 사용할 수 있습니다.
(2) 리얼 센서리스 벡터 제어는 '속도 변동을 최소로 하고싶다. 저속 토크가 필요. 토크의 돌출에 의한 기계 파손의
방지 (토크 제한), 토크 제어를 하고 싶다.' 등의 용도에 적용할 수 있습니다.
단, 부하 변동이 급격한 경우에는 장치에 의해 기계계가 불안정하게 될 우려가 있습니다.
그 때는, 어드밴스트 자속 벡터 제어로 선택해 주십시오.
또한, 출력 주파수가 0Hz 부근에 있어서 속도 추정을 할 수 없게 되기 때문에 저속 회생 영역이나
저속 경부하시의 토크 제어는 PLG 부착 벡터 제어를 사용해 주십시오.